안녕하세요
엘오토입니다.
이번 시간에는 XGF-M32E 관련, XG-PM(Software)의 이해, 기본파라미터 설정, 알람프로그래밍에 대해 알아봅니다.

XG-PM(Software)의 이해
XG-PM이라는 Software는 Freeware이며, XG5000을 설치하면 자동으로 설치됩니다. 현재 version이 3.9입니다.
본 Software는 위치결정 또는 모션의 파라미터 설정, 서보 파라미터 설정, 수동(간이)운전 등을 할 수 있으며,
XGF-M32E 관련해서는 모션 프로그래밍까지 수행하는 Tool입니다.
전체적인 구조는 XG5000과 유사하나, 모션사용을 위한 용도이기 때문에 차이점도 있습니다.
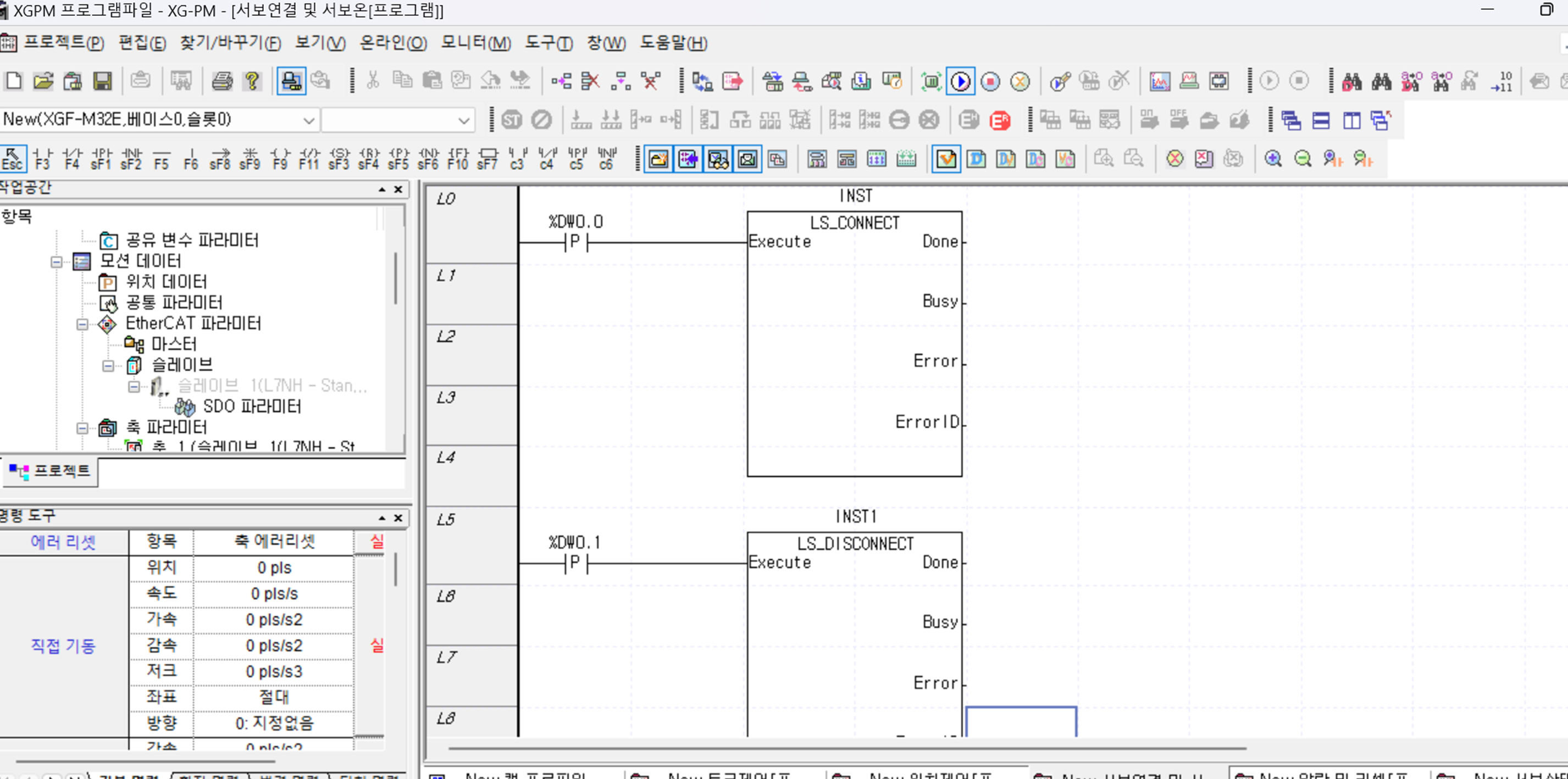
특이한 점은, M32E에 대한 런/스톱 모드를 지원합니다.
런상태에서는 프로그래밍에 의한 동작만 가능하며, 수동운전을 불가합니다.
수동운전을 하고자 한다면, 스톱모드로 변경하여 진행해야합니다.
기본파라미터 설정
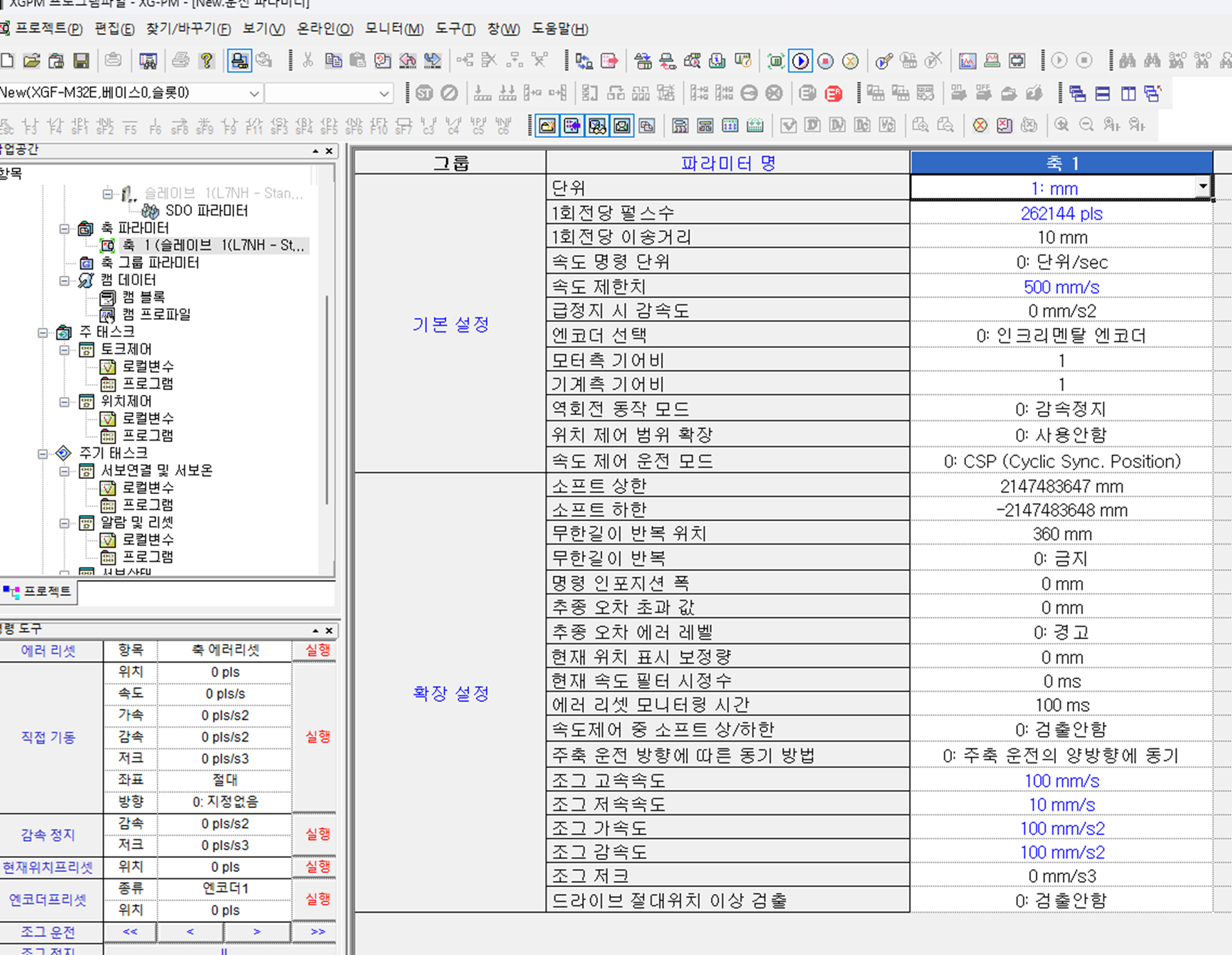
기본 파라미터 설정 화면입니다.본 설정화면은 모션모듈(M32E)에 대한 설정입니다.
서보파라미터 설정관련해서는 작업공간의 SDO파라미터를 클릭하여 수행할 수 있습니다.
기본설정의 가장 중요한 핵심은 1회전당 이송거리와 속도제한치라고 생각합니다.
이송거리는 실제 기구부의 Data를 기반으로 설정해야하는 값입니다. 실제 기구부와 다른 Data값을 입력하게 된다면
이렇게 될 것입니다. 10mm 지령을 내렸는데, 20mm 이동한다. 오류이겠지요.
2번째로 중요한것은 속도제한치입니다. 속도제한치는 모터의 속도단위와 M32E의 속도단위에 대한 감을 잡게해줍니다.
일반적으로 모터의 속도단위는 rpm(rev/min)을 사용하지만, M32E는 rpm을 사용하는 고객도 있지만, 대부분 mm/s를 사용합니다.
따라서, rpm을 mm/s로 환산한 값을 적용해야하며, 이값에 따라, 가속시간/감속시간 적용이 정확해집니다.
디폴트값은 매우 큰 수치이므로 가속시간/감속시간이 전혀 맞지 않은 값이 적용되니 꼭 유의하세요.
예를 들어, 정격rpm(3000)을 속도제한치로 둔다고 했을때 설정값을 안내합니다.
기계적인 Data는 볼스크류 10mm 피치(rev)로 가정합니다.
3000rpm=3000rev/min=3000*10mm/min=30000/60 mm/s=500mm/s
초당 500mm의 속도가 3000rpm이 됩니다.
500mm/s 지령을 주고, 이때 가속시간과 감속시간이 50mm/s2의 값이라면,
가속시간은 10초, 감속시간은 10초입니다. 속도값을 가속시간 또는 감속시간으로 나누면 됩니다.
200mm/s 지령을 주고, 이때 가속시간과 감속시간이 2000mm/s2의 값이라면,
가속시간은 0.1초, 감속시간은 0.1초입니다.
알람 프로그래밍

알람프로그래밍은 MC_Reset이라는 펑션을 사용합니다.
일반 위치결정과의 차이점이라면, 경고가 발생했을때도, 서보는 동작하지 않습니다.
따라서, 경고리셋을 수행해줘야합니다.
알람 관련 종류는 크게 2가지이며, 공통알람과 축알람입니다.
공통알람은 통신알람과 같이 모션 전체에 관련된 공통부분이고, 축알람은 해당축에만 연관된 알람입니다.
제품 구매나 Blog 관련 문의가 있으시면 댓글이나, 다음주소로 메일링 부탁 합니다.
jwleeh@lauto.kr 엘오토메이션 이진우
감사합니다.



