안녕하세요
엘오토입니다.
오늘 이시간에는 XGF-M32E 관련, 사용할 디바이스 작성(엑셀) 및 토크제어에 대한 포스팅입니다.

이번 시간이 최근 고객한테 의뢰받은 XGF-M32E 교육 및 기술구현 관련하여 마지막 글이라고 보면 됩니다.
사용할 디바이스 작성(엑셀)
사용할 디바이스 작성입니다. 머리속에 모든 내용을 정리가 잘된 상태이면 문제가 없겠지만, 다양한 디바이스와 구현하고자 하는 프로그래밍을 위한 기본적인 Data를 엑셀로 정리하면서 프로그래밍에 임한다면, 오류를 줄일 수 있습니다.
또한, M32E 제품은 비트, 바이트, 워드, 더블어드, 실수 등의 데이터 변환이 많아, 자칫 오류를 범하기 쉽습니다.
영역별로 사전에 지정을 해서 적용하다면 오류를 미연에 방지할 수 있겠지요.
예를들어, 비트영역은 %GX0~%GX1000(%GW62.8)까지 사용, 워드영역은 %GX1600(%GW100)~GX3200(%GW200)입니다.
토크제어의 개념
토크제어는 위치제어와는 다른 개념입니다. 일반적으로 볼트체결기나 장력제어 등의 설비에 활용할 수 있는 제어중의 하나입니다. 토크제어는 일정한 토크로 운전을 하고, 설정토크 이상의 외압을 받게되면, 서보모터는 정지합니다.
토크제어를 사용함에 있어 가장 기본적인 항목은 설정토크와 운전속도입니다.
XGF-M32E의 토크제어(파라미터설정)
토크제어를 사용하기 위해서는 XGPM의 이더캣 네트워크 관련 PDO 항목을 설정해줘야합니다.
TxPDO에서는 요구토크값 항목을 추가해야하고, RxPDO에서는 토크제어시 제한속도값 항목을 추가해야합니다.
본 항목의 설정이 없다면, 토크제어는 시작부터 운전이 되지 않습니다.
XGPM의 접속을 끊은후, 작업공간의 Ethercat 파라미터 - 슬레이브 - 토크제어를 할 축의 슬레이브1(예시)를 클릭합니다.
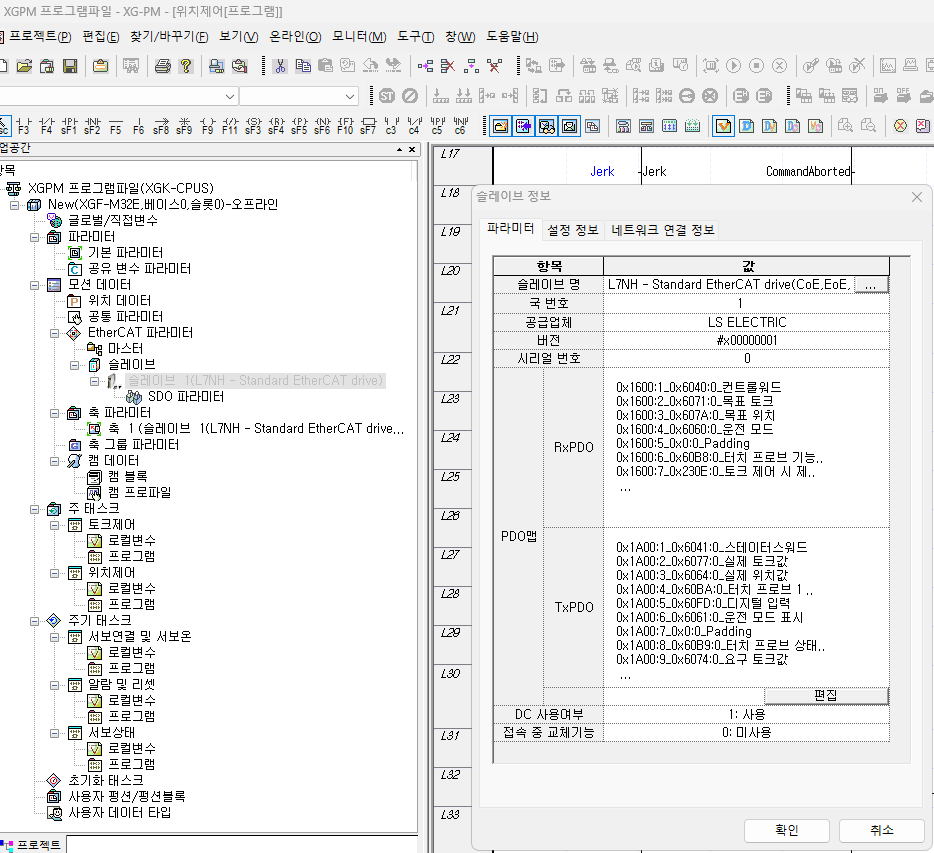
상기 2가지 항목을 화살표내리기를 선택한후, 접속을 하여 Ethercat 파라미터 쓰기를 수행해주면 됩니다.
XGF-M32E의 토크제어(프로그래밍)
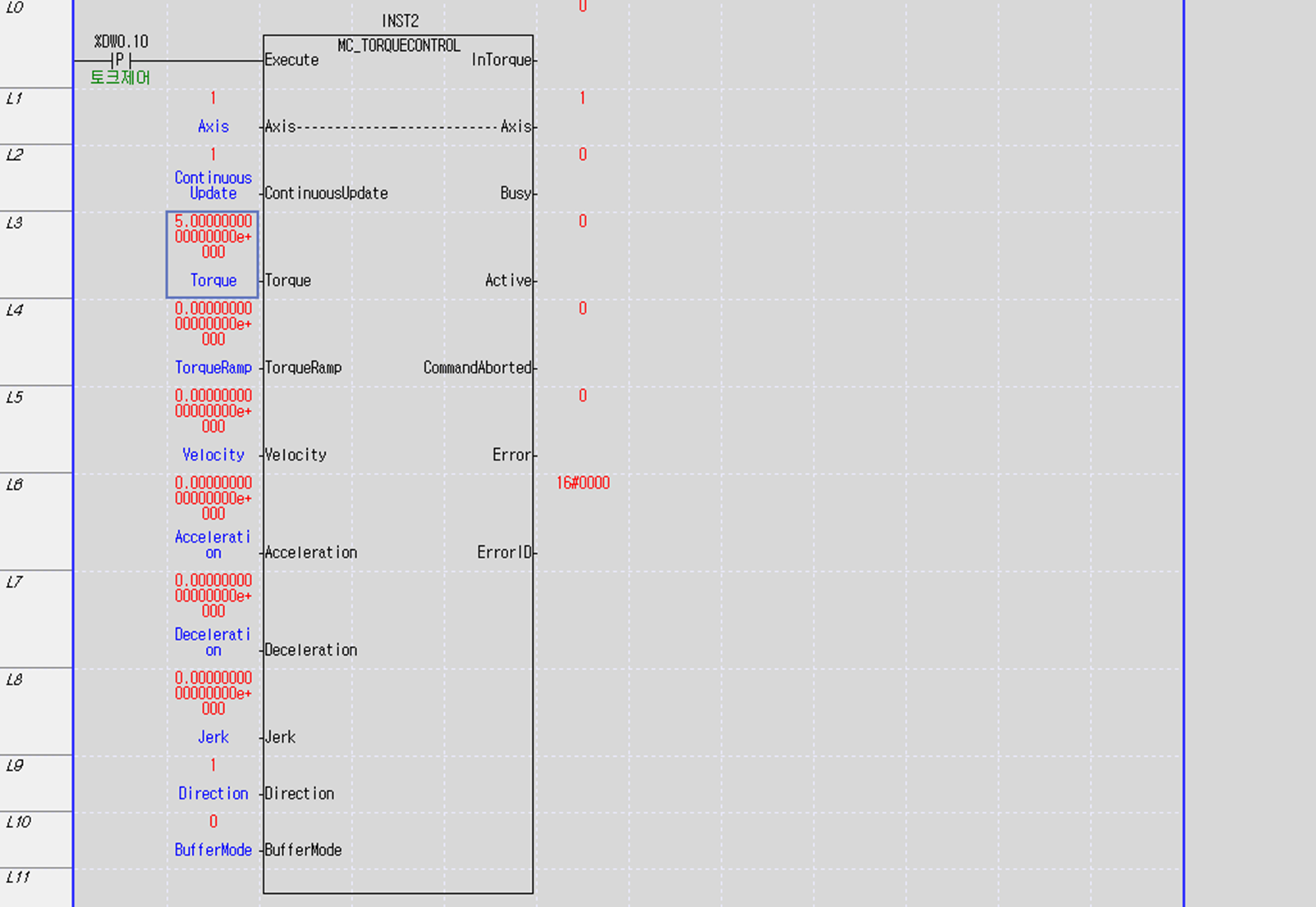

펑션은 MC_TORQUECONTROL을 사용합니다.
실시간으로 토크값을 변경하고자 한다면 ContinuousUpdate 항목을 1로 입력하고, 진행하면 됩니다.
운전속도값을 변경하고자 한다면, %QW1.6의 값이 변경되도록 설정해주면 됩니다.
실제 운전을 해보면서 토크제어의 감을 익힐 수 있습니다.
제품 구매나 Blog 관련 문의가 있으시면 댓글이나, 다음주소로 메일링 부탁 합니다.
jwleeh@lauto.kr 엘오토메이션 이진우
감사합니다.



