안녕하세요
엘오토입니다.
오늘 이시간에는 XGF-M32E 관련, 조그운전과 위치제어에 대한 내용을 포스팅합니다.

기존 Summary
XGF-M32E를 구입해서, 제품 배선을 하고, 기본적인 M32E에 대한 하드웨어적인 이해와 태스크, 네트워크에 대해 이해를 합니다. XGPM의 단축아이콘을 통해 서보연결 및 서보온을 해볼수 있습니다.
공유디바이스설정을 통해 프로그래밍을 위한 초석을 다지고, 기본 파라미터 설정 및 알람 관련 내용을 반영합니다.
본 준비가 다되면 본격적인 프로그래밍을 통해 동작구현을 해볼 수 있습니다.
조그운전이나 1피치 운전이 이에 해당됩니다.
조그운전
조그운전은 일종의 수동운전입니다.
지령속도에 따라 on이 되었을때만 서보모터가 동작하는 운전입니다.
조그운전의 펑션은 LS_JOG입니다.
방향과 저속/고속을 선택하여 동작시킬 수 있습니다.
HMI(또는 터치스크린)에서 속도값을 변경하고자 할때에는 MC_WRITEPARAMETER를 사용해야합니다.
본 펑션은 실시간으로 적용은 안되며, 정지상태에서 수행해야합니다.
MC_READPARAMETER는 속도변경한 값을 상시온으로 읽는 펑션입니다.
값이 잘 쓰기 되었는지 한번더 확인할 수 있는 펑션으로 보면 됩니다.
위치제어
위치제어입니다. 위치제어는 서보모터의 꽃이라고 할 수 있는 명령어, 즉 펑션이라고 보면 됩니다.
아주 기본적이고, 중요한 명령어입니다.
MC_MOVEABSOLUTE라는 펑션입니다. 목표위치와 목표속도, 가감속시간을 활용하여 운전을 하는 형태입니다.
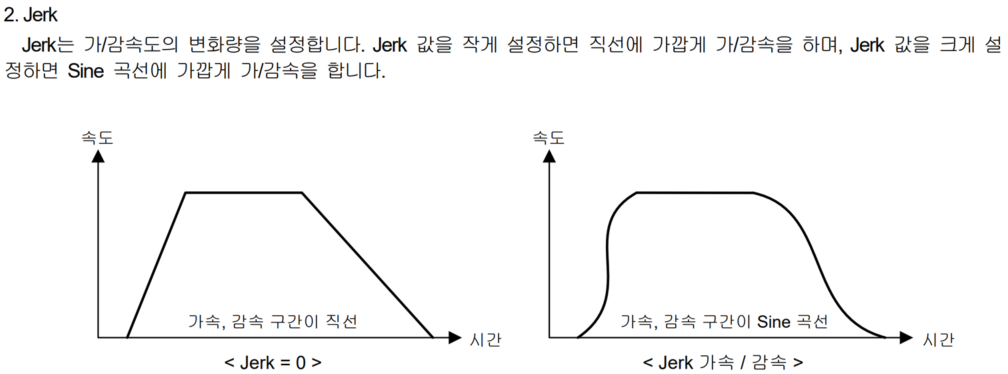
저크라는 생소한 용어가 있는데 이것은 동작의 변화가 심할때 좀더 부드럽게 하기 위한 항목입니다.(Jerk)
저는 일반적으로 본 용어를 제어에 사용하지는 않습니다. 잘못사용하게 되면, 더욱 불안한 동작을 만들기 때문입니다.
특이사항으로는 입력값은 대부분 실수(REAL)입니다.
단장형/배장형 실수이기 때문에 터치나 XGK-CPUS에서 데이터를 바로 사용할 수 없습니다.
데이터 변환을 통해 운영해야한다는 단점이 있습니다.
다음 화면은 데이터 변환 프로그래밍의 예입니다.

Continuous Update 및 BufferMode의 적용
위치제어인 MC_MOVEABSOLUTE 펑션의 항목을 보면, Continuous Update 및 BufferMode가 있습니다.
본 항목들은 제어의 고급화를 위해 필요한 기능입니다.
Continuous Update는 실시간운전을 위해 사용됩니다. 0이면, 운전중에 값을 바꿀수 없고,
1로 값을 입력하면, 운전중에 목표위치를 비롯한 속도 등의 항목의 값을 바꾸어 동작구현할 수 있습니다.

BufferMode는 기존운전중에 본 명령가 실행될 경우, 지령이 수행되는 시점을 설정할 수 있습니다.

제품 구매나 Blog 관련 문의가 있으시면 댓글이나, 다음주소로 메일링 부탁 합니다.
jwleeh@lauto.kr 엘오토메이션 이진우
감사합니다.



