안녕하세요
엘오토입니다.
오늘 이시간에는 XGF-PN4B+L7NH 서보를 활용하여 위치제어 기능 구현에 대한 내용을 포스팅합니다.
Concept
금번내용은 대학교에서 요청한 내용으로, 동작은 단순합니다.
동작 뿐만아니라 기본적인 XGF-PN4B를 운영함에 있어 필요한 내용을 소개하고자 합니다.
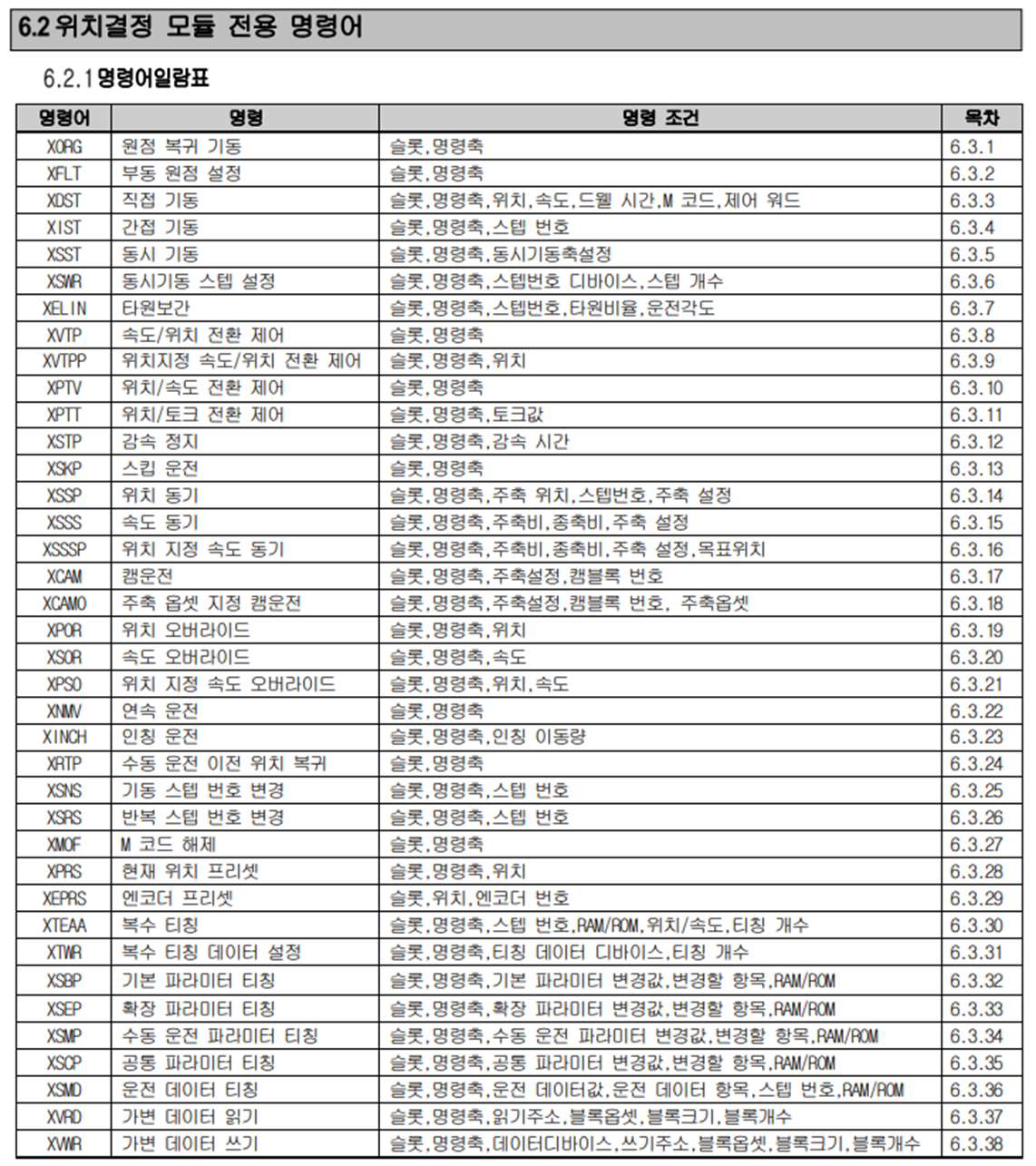
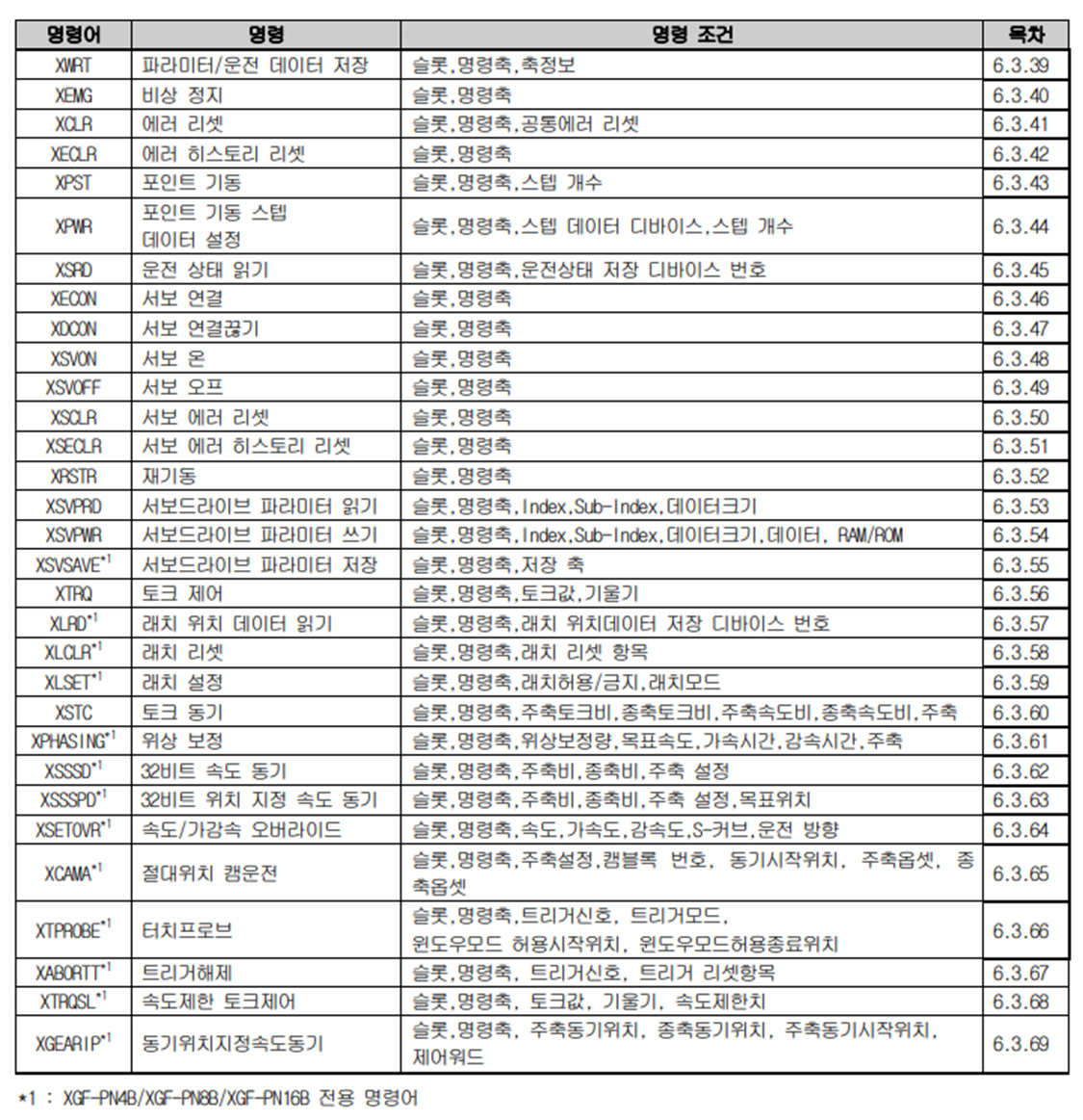
명령어 일람표
XGF-PN4B의 전용위치결정 명령어는 다양합니다. 제어를 함에 있어 모든 명령어를 사용하지는 않습니다.
필수적이고 꼭 필요한 내용을 활용하시면 됩니다.
명령어 종류는 다음과 같습니다.
서보연결(Ethercat 통신연결) 및 서보온
서보연결과 서보온을 하기전에 현재 구성된 제품간에 이더캣 네트워크 드라이버 연결을 위해
XG-PM(Software)에서 자동연결 또는 수동연결(네트워크 파라미터 생성)을 해야합니다.
XG-PM의 온라인 메뉴에서 PLC 접속을 한뒤, 이더캣 슬레이브 - 자동연결을 하시면 됩니다.
수동연결은 접속전에 작업공간에서 슬레이브에 마우스 우클릭하여 슬레이브 추가를 한뒤
L7NH를 선택, 접속하여 이더캣파라미터를 쓰기한후, 온라인에서 이더캣슬레이브-서보연결을 수행하면 됩니다.
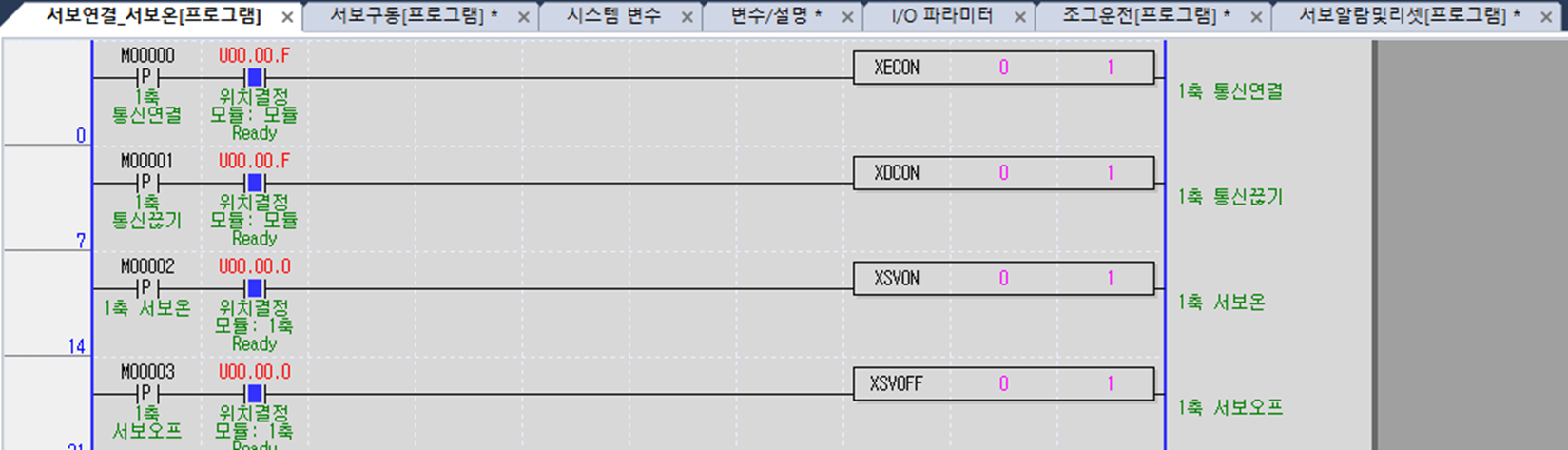
다음화면과 같이 서보연결(끊기) 및 서보온(오프) 명령어 프로그래밍을 하면됩니다.
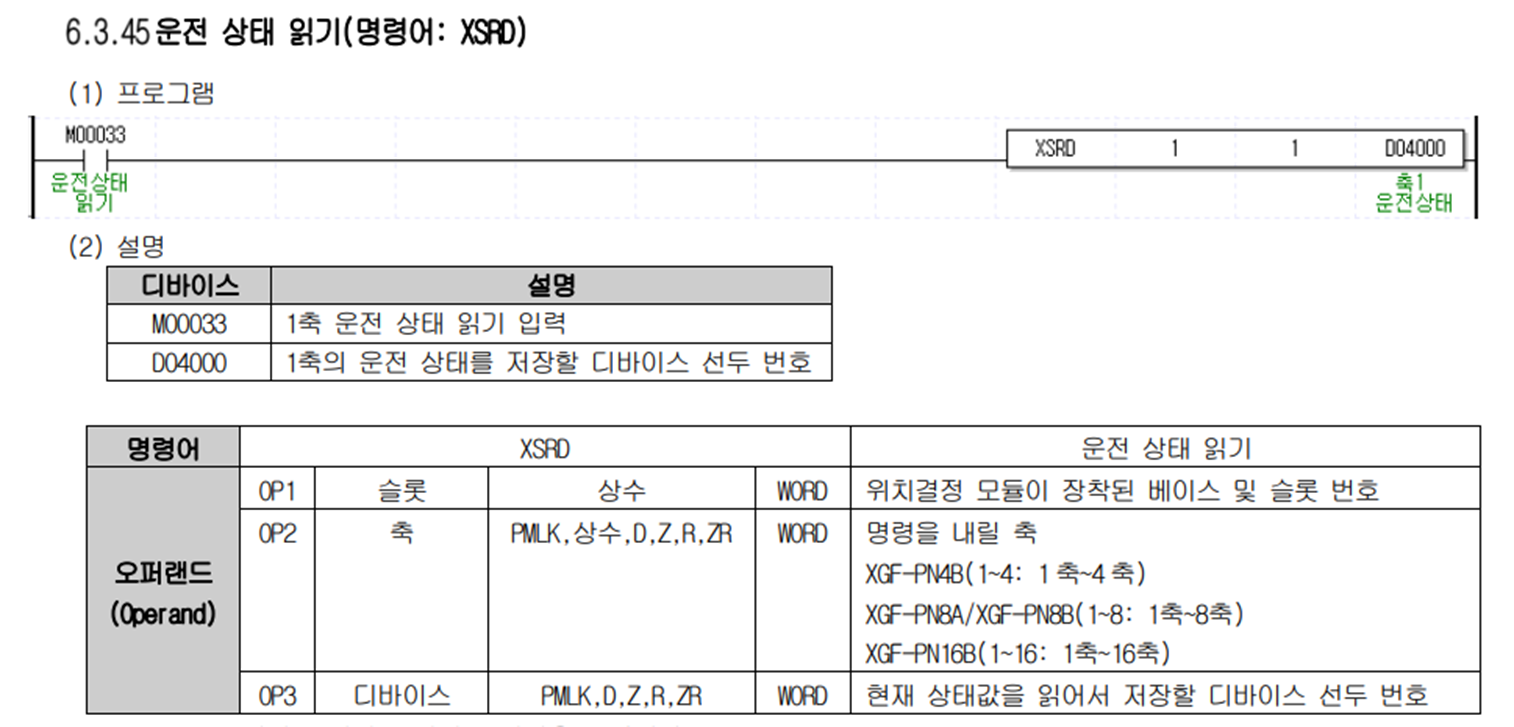
현재 운전상태 정보읽기(XSRD)
위치결정모듈인 XGF-PN4B와 L7NH의 서보 정보에 대한 읽기를 수행하는 명령어입니다.
운전상태(bit) 및 현재위치&속도&에러코드(word) 등의 정보를 프로그래밍에 활용할 수 있습니다.
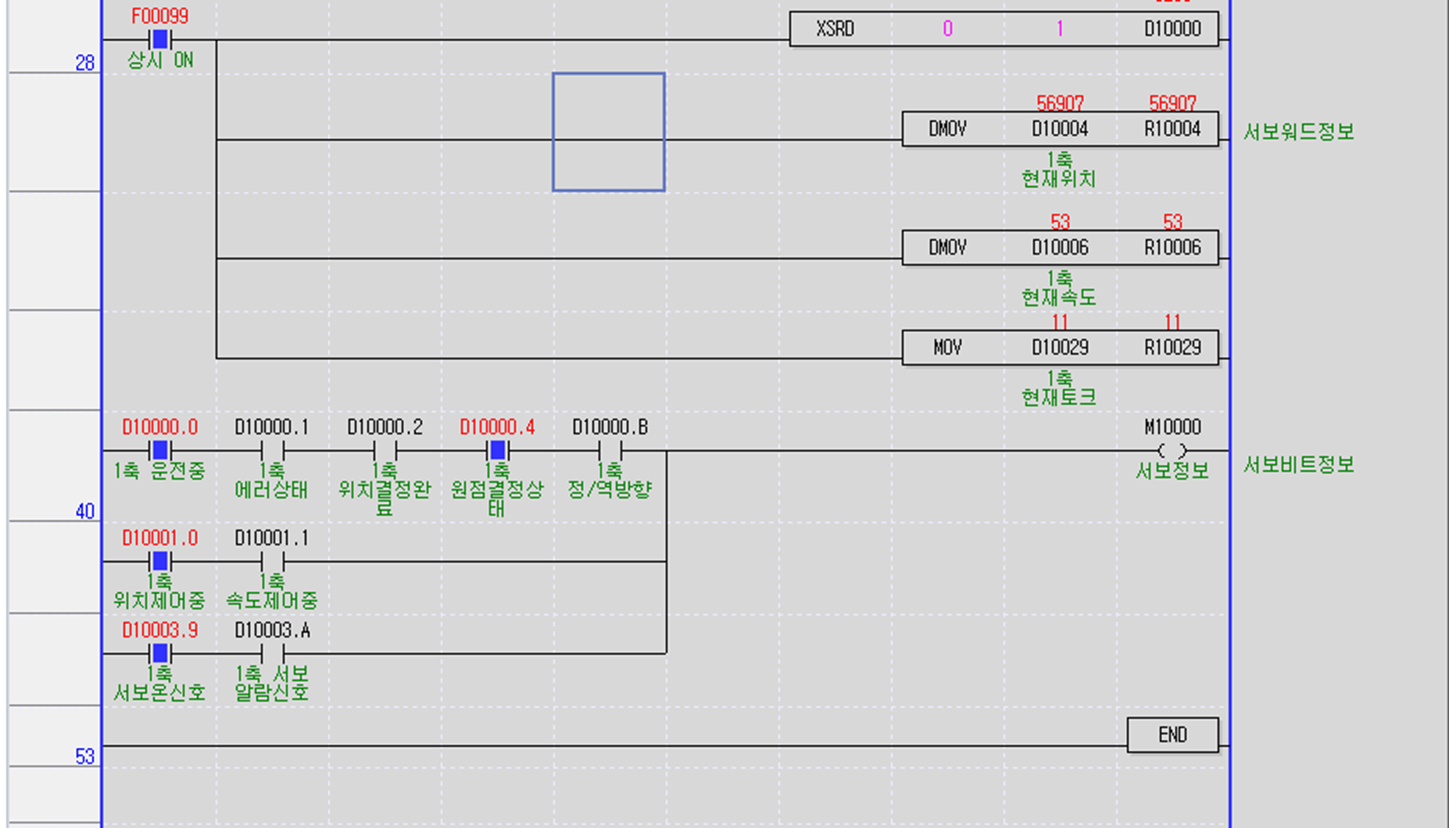
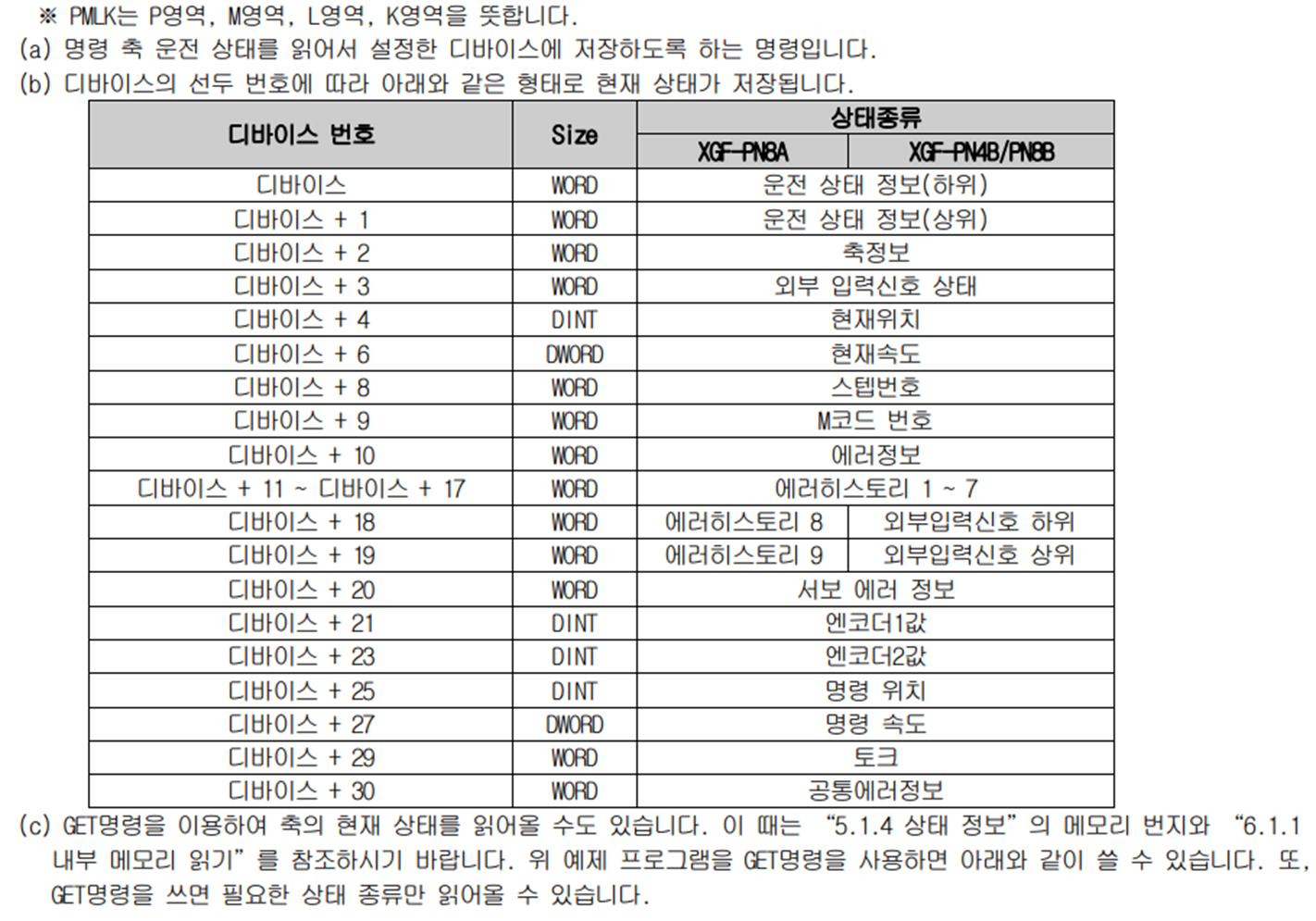
운전정보상태(하위)
명령어에서 선두어드레이스 D10000으로 선택했으며, 운전정보상태(하위)의 어드레스는 D10000.0~D10000.F입니다.

운전상태정보(상위)
운전상태정보(상위)에 대한 어드레스는 D10001.0~D10001.F입니다.

축정보
축정보에 대한 어드레스는 D10002.0~D10002.F입니다.

외부 신호
외부신호에 대한 어드레스는 D10003.0~D10003.F입니다.

축에러 및 서보에러 정보 및 리셋
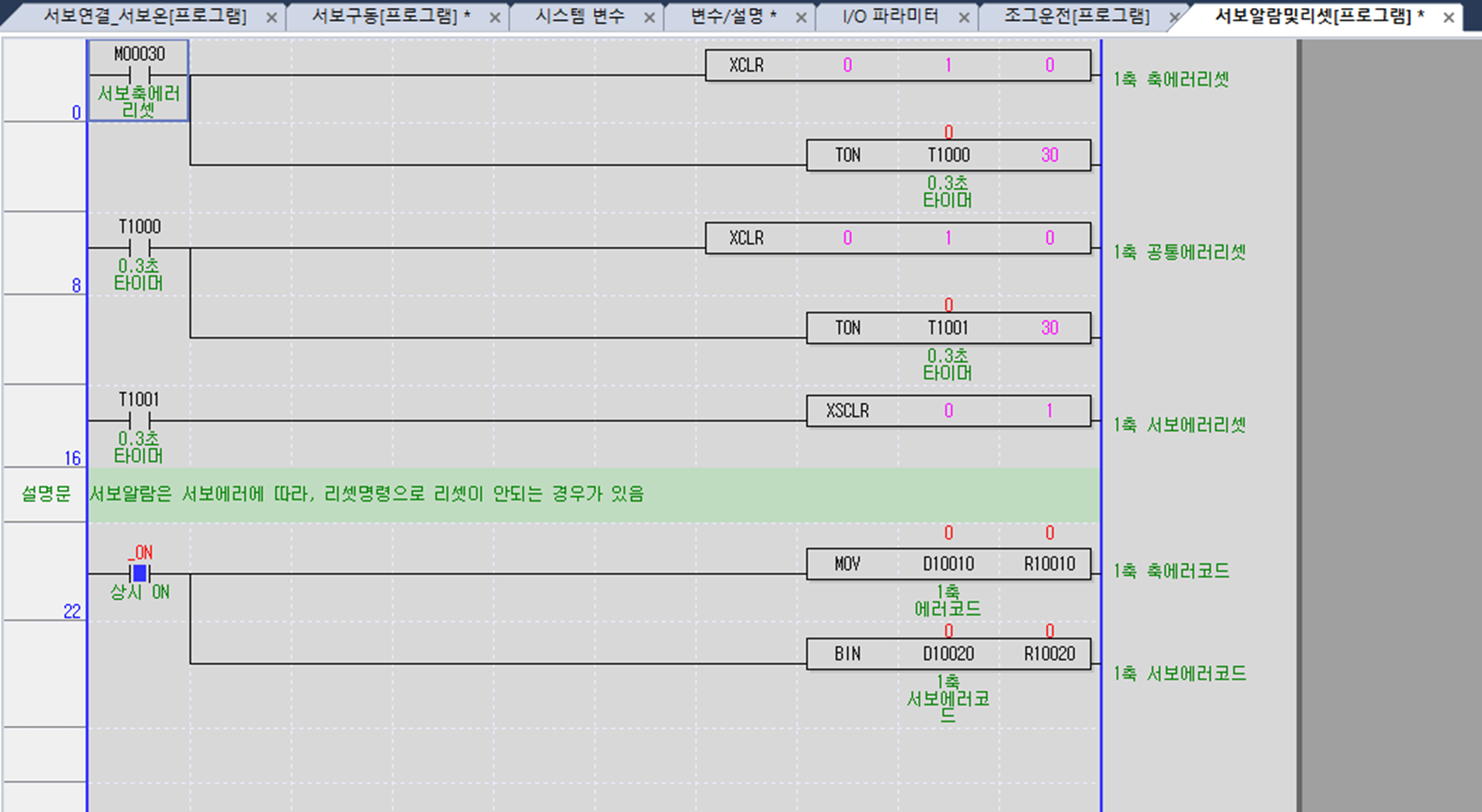
XSRD 명령어를 통해 축에러코드 및 서보에러코드 정보를 읽을 수 있습니다.
유의사항은 서보에러코드는 16진수 표현으로 인해 BIN 명령어로 해당 코트를 읽을 수 있습니다.
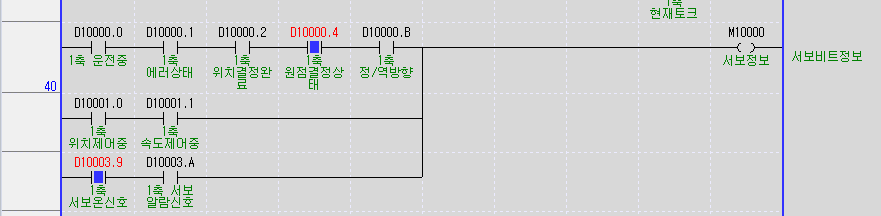
XSRD 명령어를 통해 축에러와 서보에러에 대한 비트정보를 읽을 수 있습니다.
축에러는 D10000.1이며, 서보에러는 D10003.A입니다.
에러가 발생한 경우 에러리셋 명령어는 다음과 같습니다.
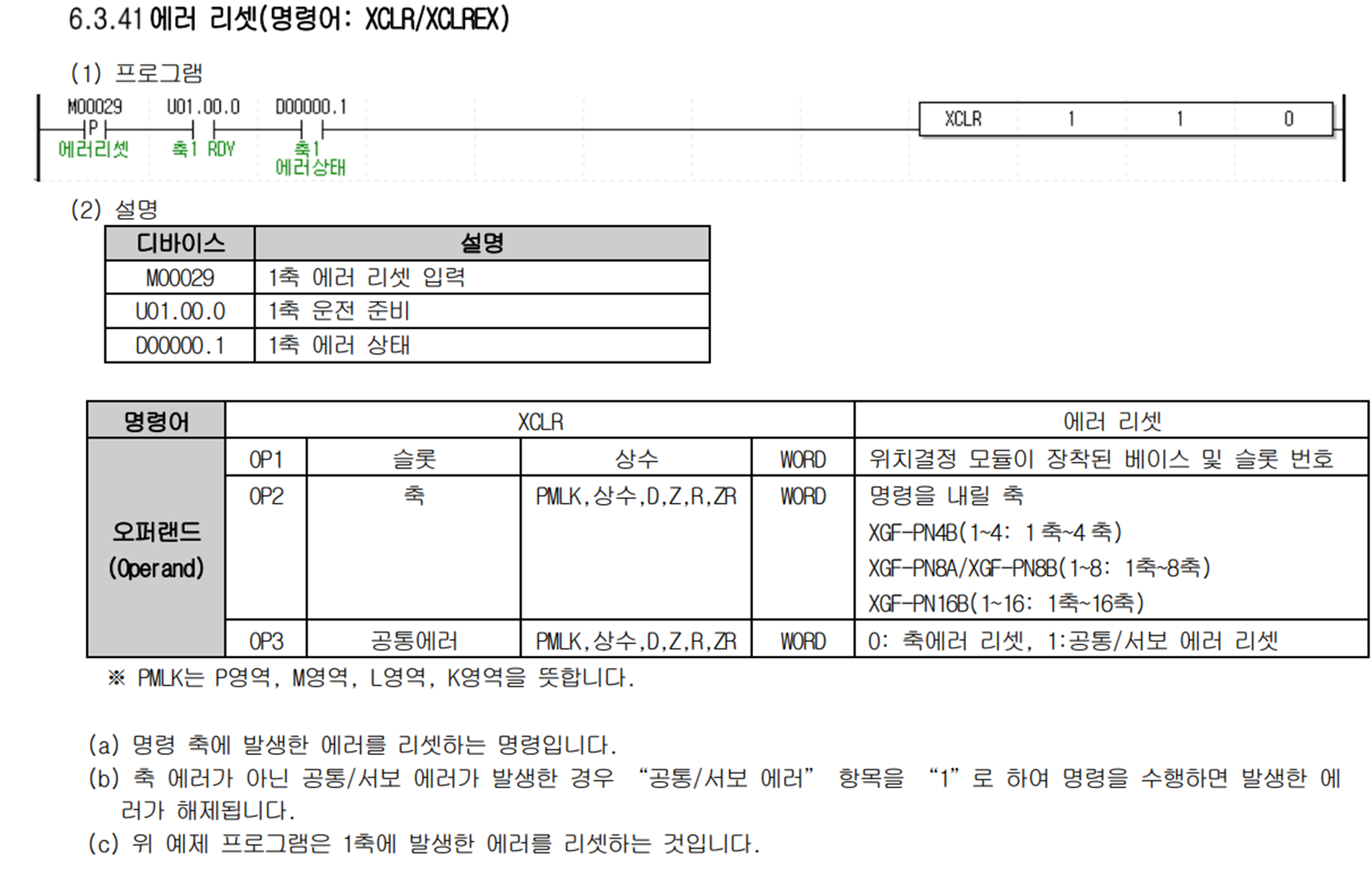
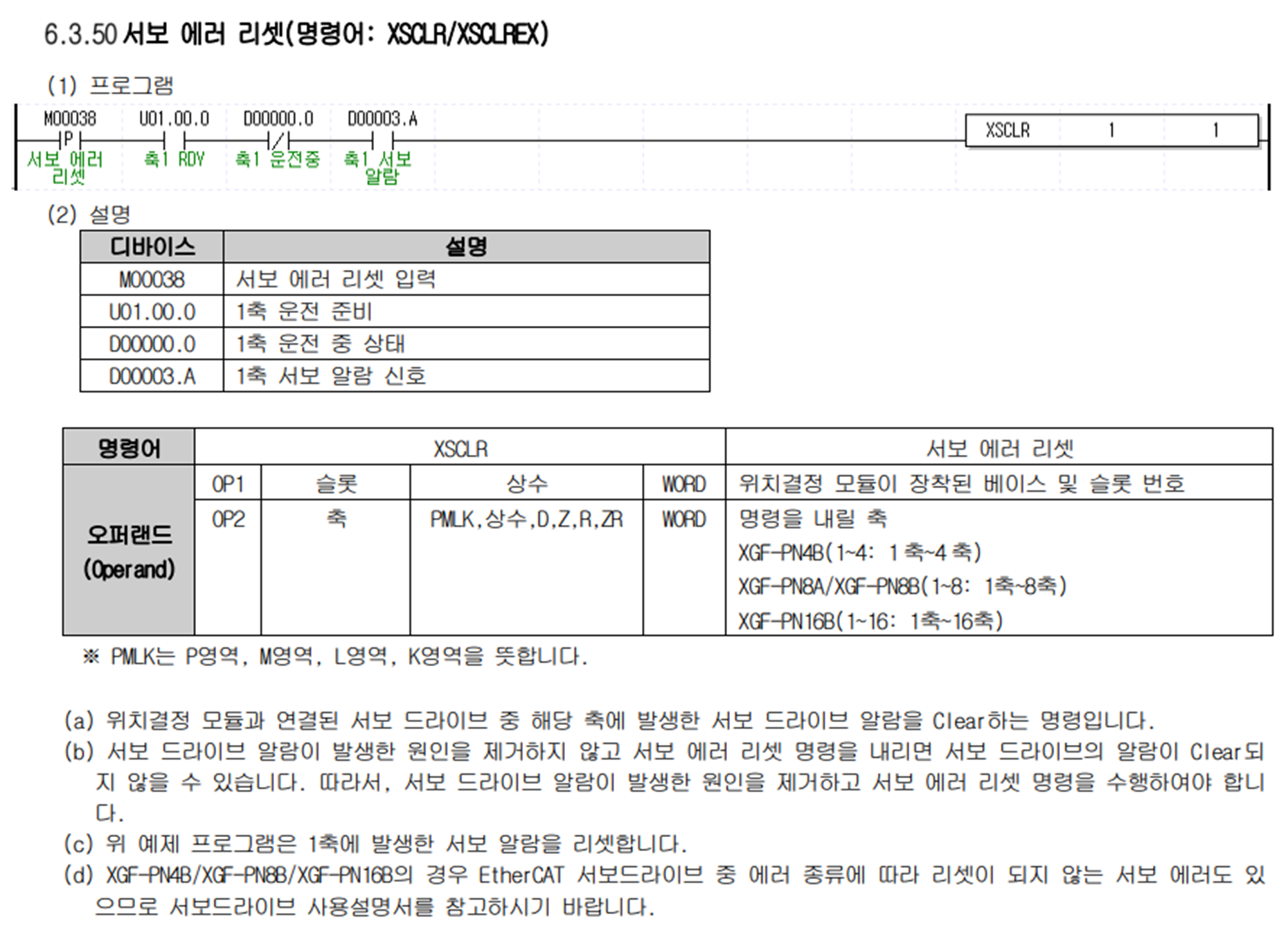
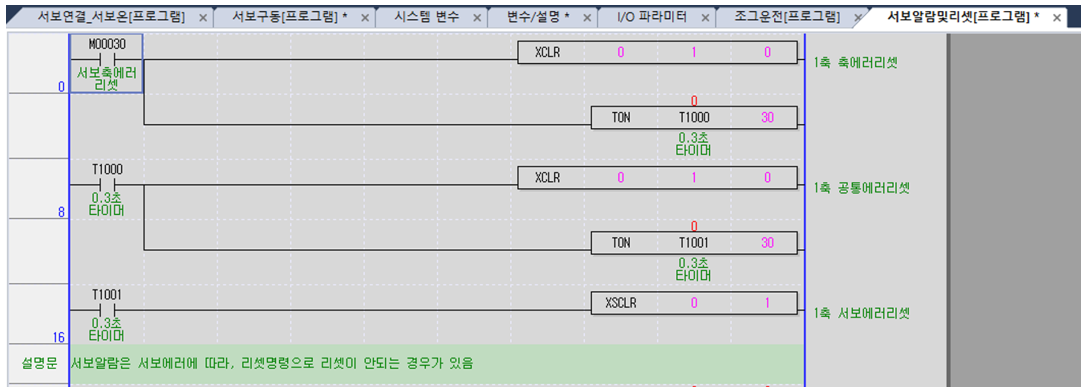
축에러는 XCLR이라는 명령어를 사용하며, 축에러와 공통에러리셋 2가지를 수행해야하며, 서보에러는 XSCLR이라는
명령어를 사용합니다.
세가지 명령어는 한번 조건으로 사용할 수는 없습니다. XGF-PN4B제품이 1개의 축에 여러가지 명령어를 사용할 수 없기 때문입니다. 이경우에 TON이라는 타이머를 활용하여 리셋을 수행하면 됩니다.
조그운전
조그운전은 지정된 U영역을 활용하여 조그운전을 할 수 있으며, 티칭명령어인 XSMP를 통해 조그속도를 변경할 수 있습니다.





조그속도는 운전중에는 변경이 안되고, 정지상태에서 실행할 수 있습니다.
위치제어
고객이 요청한 기능은 정방향 180도 회전, 역방향 180도 회전입니다.
명령어는 XDST와 XIST 둘다 가능한 기능입니다.
오늘은 XDST라는 직접기동 명령어를 활용해 봤습니다.



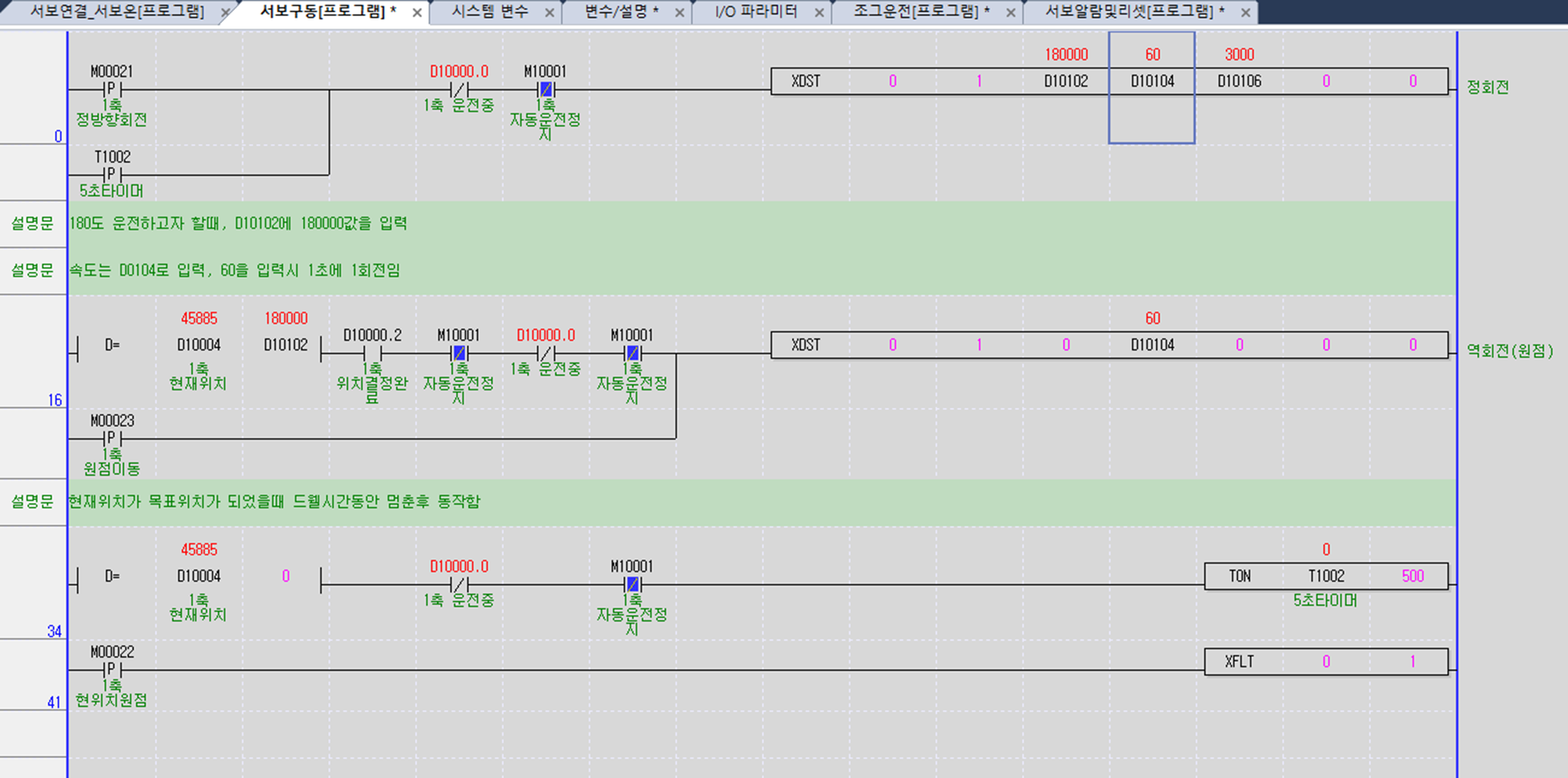
어렵지 않게 구현하실 수 있습니다.
제품 구매나 Blog 관련 문의가 있으시면 댓글이나, 다음주소로 메일링 부탁 합니다.
jwleeh@lauto.kr 엘오토메이션 이진우
감사합니다.



